BOSM-6025 مخالف-سر بورنگ ملنگ مشين
1. ساماناستعمال:
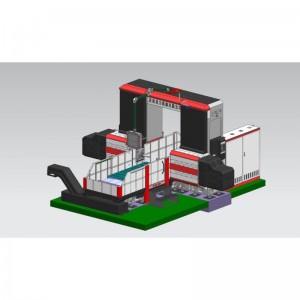
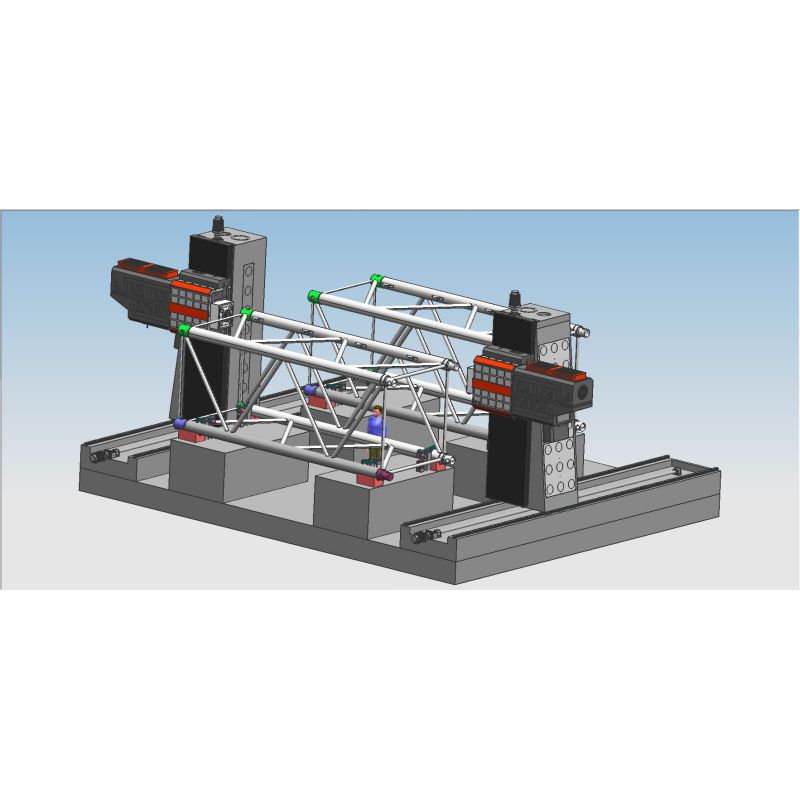
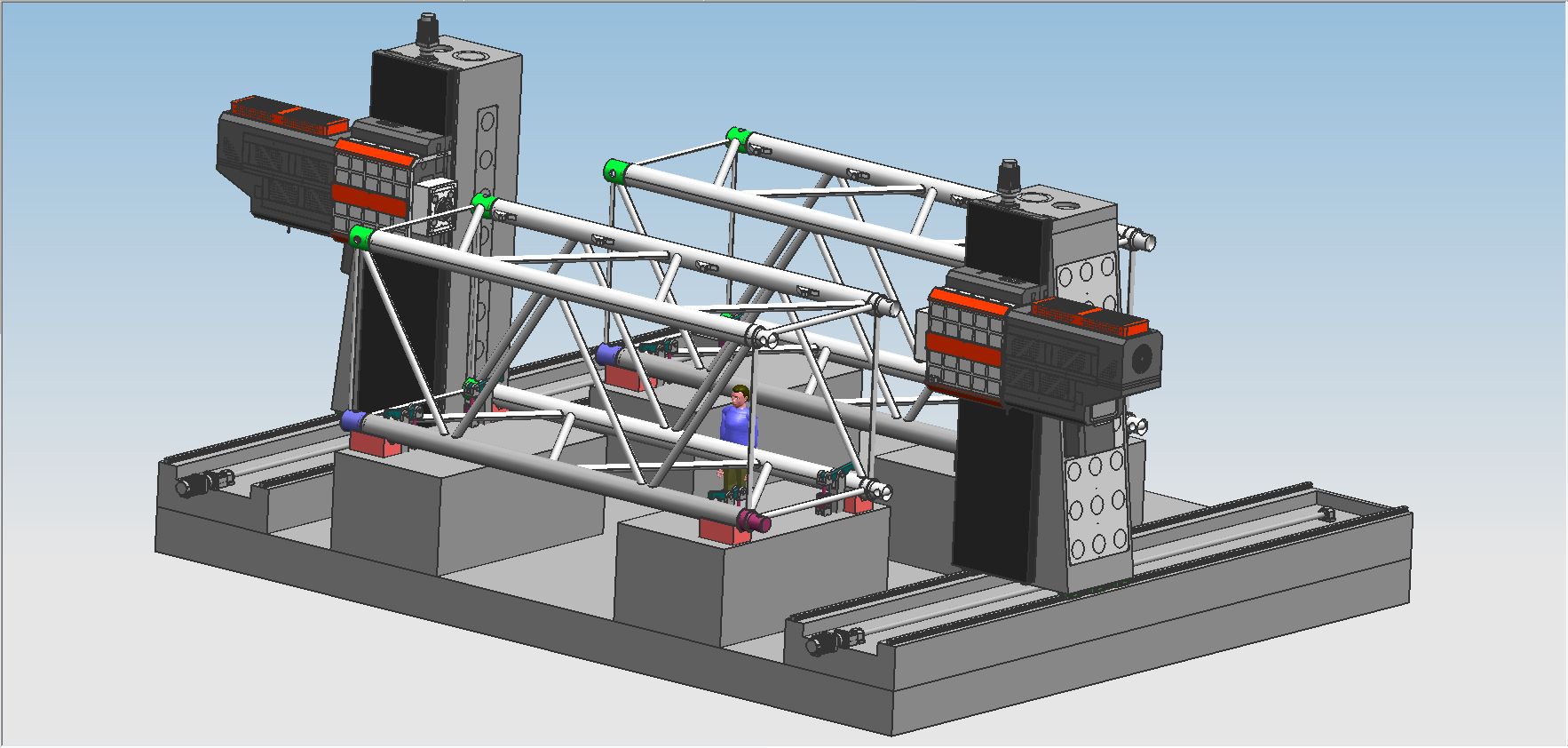
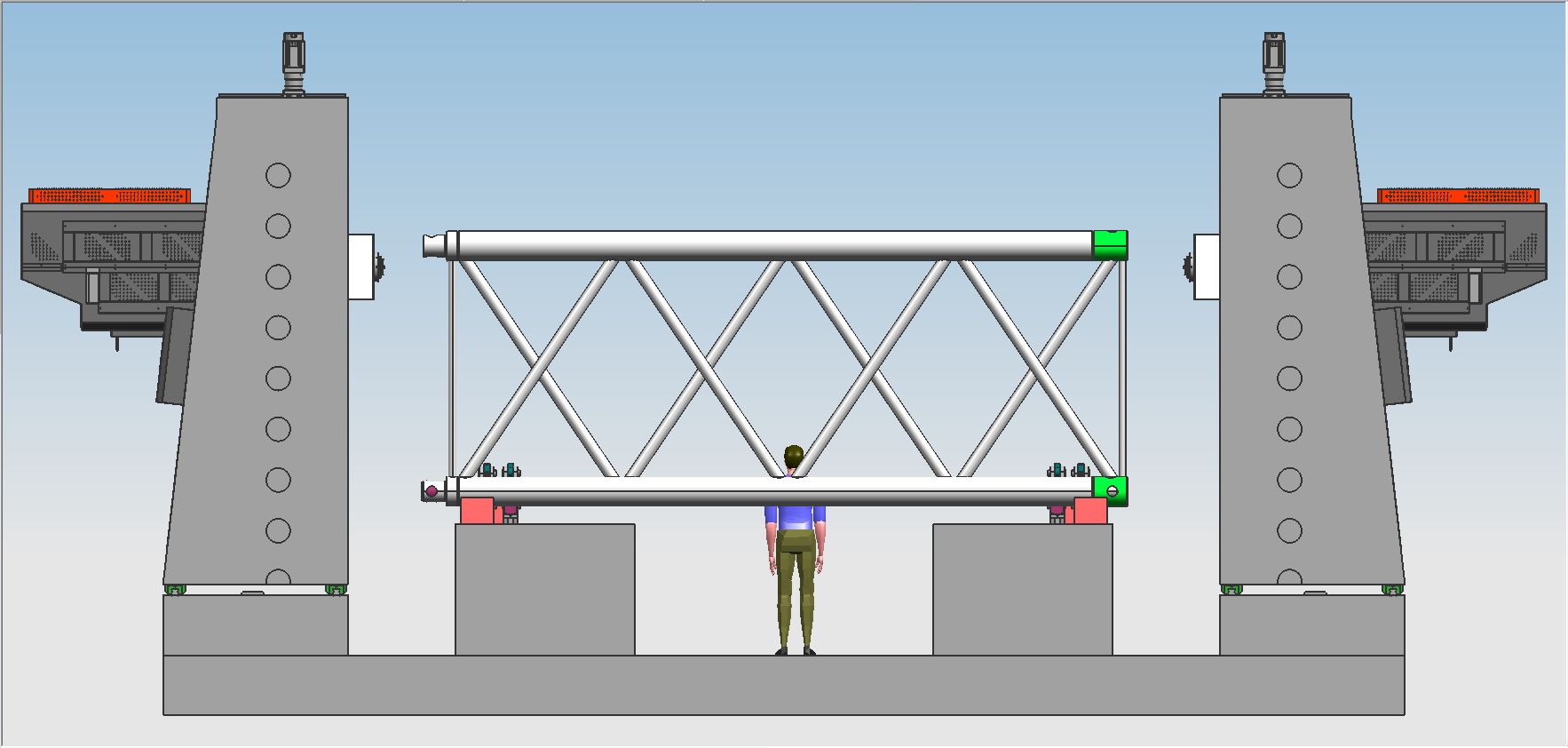
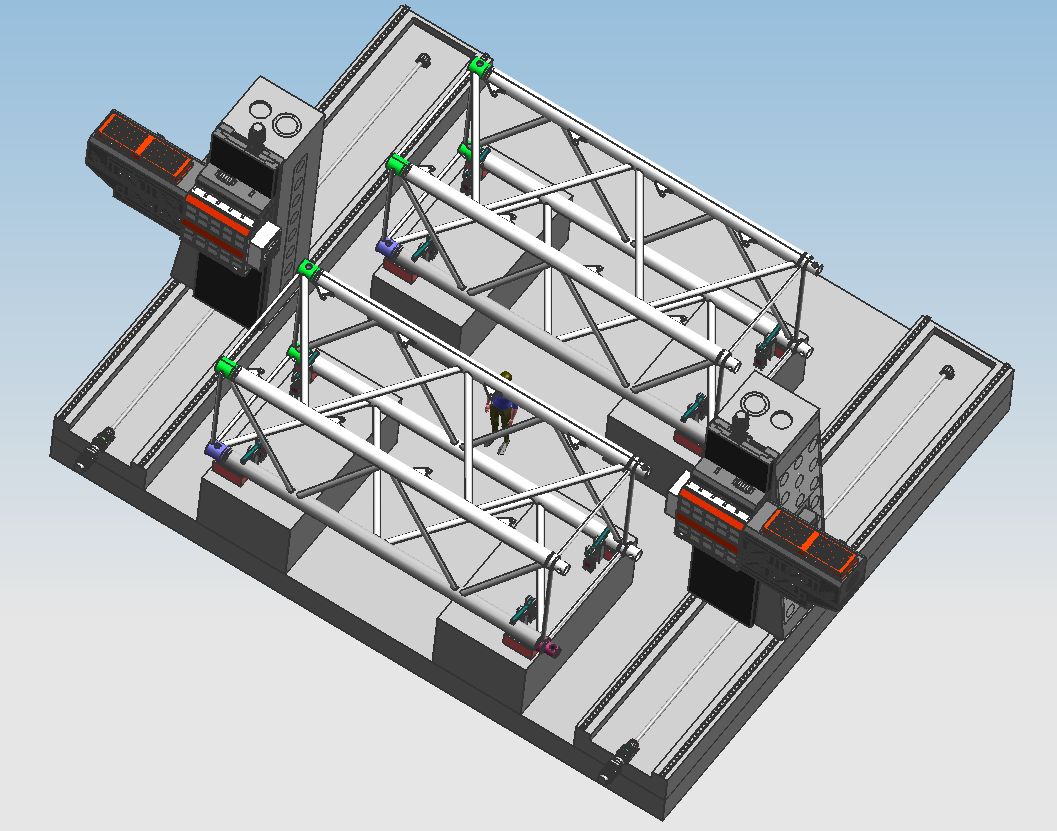
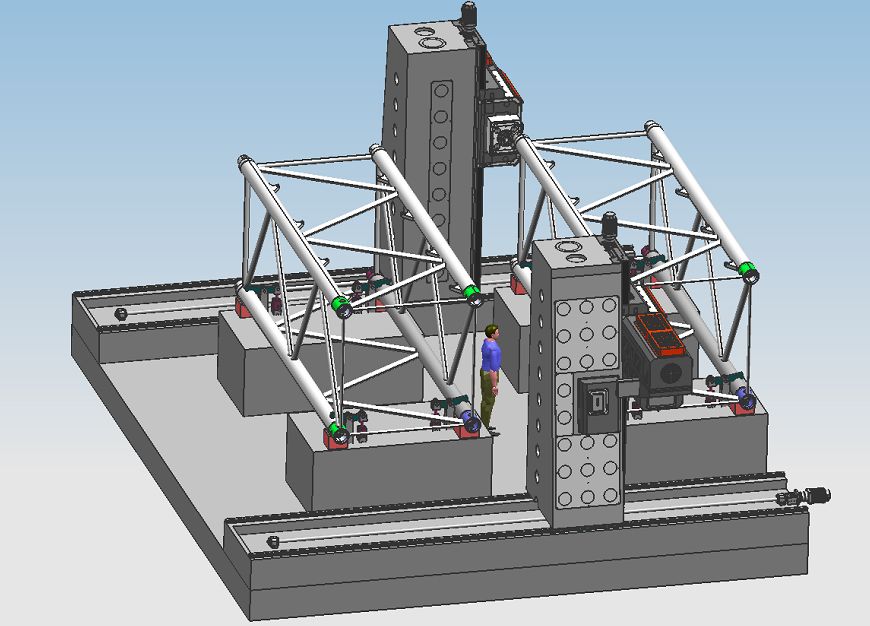
BOSM-6025 ڊبل اسٽيشن، CNC عمودي ڪالمن متحرڪ ڊبل ڪالمن هيڊ کان هيڊ بورنگ ۽ ملنگ مشين هڪ خاص مشين وارو اوزار آهي تعميراتي مشينري جي سميٽيڪل ورڪ پيس لاءِ.مشين ٽول هڪ خاص متحرڪ ڪالمن ۽ افقي رمز جي ٻن سيٽن سان ليس آهي، جيڪو مؤثر اسٽروڪ رينج جي اندر ڪم پيس جي ڊرلنگ، ملنگ، بورنگ ۽ ٻين پروسيسنگ کي محسوس ڪري سگهي ٿو، ورڪ پيس کي هڪ وقت ۾ جاء تي پروسيس ڪري سگهجي ٿو (ضرورت ناهي. ثانوي ڪلپنگ لاء)، تيز لوڊ ڪرڻ ۽ لوڊ ڪرڻ جي رفتار، تيز پوزيشن جي رفتار، اعلي پروسيسنگ جي درستگي ۽ اعلي پروسيسنگ ڪارڪردگي.
2. سامان جي جوڙجڪ:
2.1. مشين ٽول جا مکيه حصا
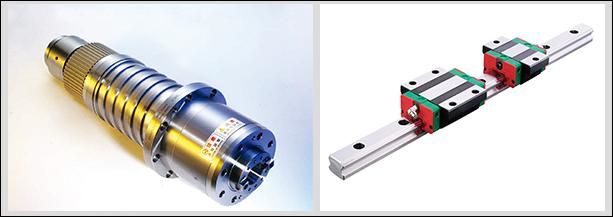
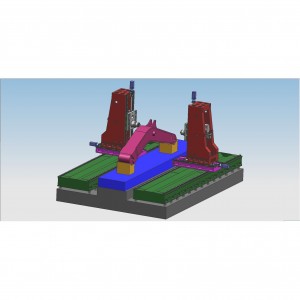
بيڊ، ورڪ بينچ، کاٻي ۽ ساڄي ڪالم، بيم، سيڊل، ريم ۽ ٻيا وڏا حصا سڀ رين سان ٺهيل آهن، اعلي معيار جي گرين آئرن 250 ڪاسٽنگ، گرم واريء جي کڏ ۾ annealed → vibration aging → hot furnace annealing → vibration aging → سخت مشين → وائبريشن ايجنگ → گرم فرنس اينيلنگ → وائبريشن ايجنگ → فائنشنگ ، مڪمل طور تي حصن جي منفي دٻاءُ کي ختم ڪرڻ ، ۽ حصن جي ڪارڪردگي کي مستحڪم رکڻ.مشين ٽول جا ڪم آهن جهڙوڪ ملنگ، بورنگ، ڊرلنگ، ڪائونٽر سڪنگ، ٽيپنگ وغيره، ۽ ٽول کولنگ جو طريقو خارجي کولنگ آهي، مشين ٽول ۾ 6 فيڊ محور آهن، جيڪي 4-محور لنڪيج ۽ 6-محور سنگل- کي محسوس ڪري سگھن ٿا. عمل.اتي 2 پاور سر آهن.مشين ٽول جو محوري رخ ۽ پاور هيڊ هيٺ ڏنل شڪل ۾ ڏيکاريل آهن.
2. 2محوري ٽرانسميشن فيڊ حصو جي بنيادي جوڙجڪ
2.2.1 X 1/X2 محور: ڪالمن ڊگھي طور تي مقرر ٿيل بيڊ جي گائيڊ ريل سان گڏ.
X-axis ٽرانسميشن: AC سروو موٽر ۽ اعلي-صحت واري سيارو گھٽائڻ وارو استعمال ڪيو ويندو آھي ٻن ڪالمن کي ڊرائيو ڪرڻ لاءِ بال اسڪرو ٽرانسميشن ذريعي ايڪس محور جي لڪير واري حرڪت کي محسوس ڪرڻ لاءِ.
ھدايت ريل فارم: ٻه اعلي طاقت جي سڌائي لڪير گائيڊ ريل رکي.
2.2.2 Y1 محور: پاور هيڊ ۽ هڪ رام عمودي طور تي ڪالمن جي سامهون واري پاسي تي نصب ٿيل آهن، ۽ ڪالمن جي گائيڊ ريل سان گڏ کاٻي ۽ ساڄي طرف موٽڻ.
Y1-axis ٽرانسميشن: AC سروو موٽر استعمال ڪيو ويندو آهي بال اسڪرو کي هلائڻ لاءِ سيڊل کي هلائڻ لاءِ ، ۽ محسوس ڪيو Y1- محور لڪير واري حرڪت.
گائيڊ ريل فارم: 4 لڪير گائيڊ ريل + هارڊ ريل چورس رام گڏيل.
2.2.3 Y2 محور: پاور هيڊ جو ٻيو رام عمودي طور تي ڪالمن جي سامهون واري پاسي تي نصب ٿيل آهي، ۽ ڪالمن جي گائيڊ ريل سان گڏ کاٻي ۽ ساڄي طرف موٽائي ٿو.
Y2-axis ٽرانسميشن: AC سروو موٽر استعمال ڪيو ويندو آهي بال اسڪرو کي هلائڻ لاءِ سيڊل کي هلائڻ لاءِ ، ۽ محسوس ڪيو Y2- محور لڪير واري حرڪت.
گائيڊ ريل فارم: 4 لڪير گائيڊ ريل + هارڊ ريل چورس رام گڏيل.
2.2.4 Z1 محور: پاور هيڊ سلائيڊنگ سيڊل عمودي طور تي ساڄي ڪالمن جي سامهون واري پاسي تي نصب ٿيل آهي، ۽ ڪالمن جي گائيڊ ريل سان گڏ مٿي ۽ هيٺان مٽائي ٿي.
Z1-axis ٽرانسميشن: AC سروو موٽر ۽ اعلي-صحت واري پلانٽ ريڊيسر استعمال ڪيا ويندا آهن رام کي هلائڻ لاءِ بال اسڪرو ذريعي منتقل ڪرڻ لاءِ Z1 -axis لڪير واري حرڪت کي محسوس ڪرڻ لاءِ.
ھدايت ريل فارم: 2 لڪير گائيڊ ريل.
2.2.5 Z2 محور: پاور هيڊ سلائڊ سيڊل عمودي طور تي ساڄي ڪالمن جي سامهون واري پاسي تي نصب ٿيل آهي، ۽ ڪالمن جي گائيڊ ريل سان گڏ مٿي ۽ هيٺان کي ملائي ٿو.
Z1-axis ٽرانسميشن: AC سروو موٽر پلس هاء-پريزيئن پلانٽ ريڊيسر استعمال ڪيو ويندو آهي رام کي هلائڻ لاءِ بال اسڪرو ذريعي هلڻ لاءِ Z2 -axis لڪير واري حرڪت کي محسوس ڪرڻ لاءِ.
ھدايت ريل فارم: 2 لڪير گائيڊ ريل
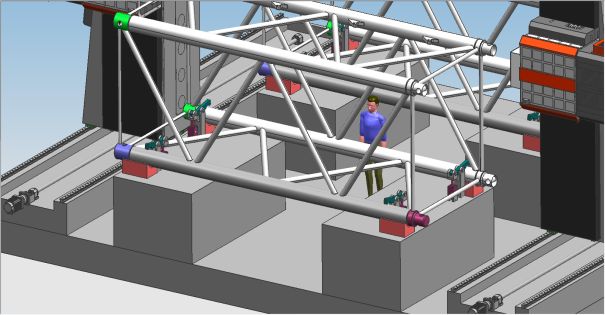
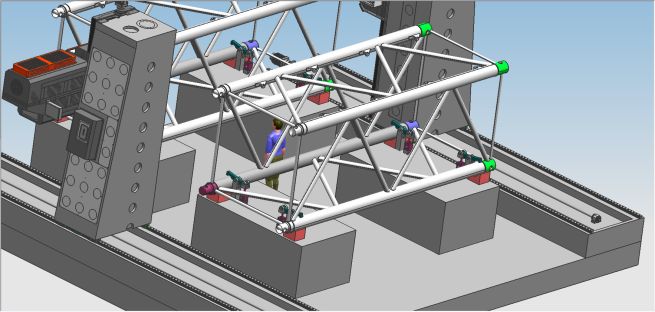
بورنگ ۽ ملنگ پاور هيڊ (بشمول پاور هيڊ 1 ۽ 2) هڪ مرڪب اسڪوائر ريم آهي، ۽ حرڪت واري هدايت 4 لينر رولر گائيڊ ريل ذريعي هدايت ڪئي وئي آهي.ڊرائيو هڪ AC سروو موٽر استعمال ڪري ٿي صحيح بال اسڪرو جوڙو هلائڻ لاءِ.مشين هڪ nitrogen توازن بار سان ليس آهي.، اسڪرو ۽ سرو موٽر تي مشين جي سر جي بيئرنگ ظرفيت کي گھٽايو.Z-axis موٽر وٽ هڪ خودڪار بريڪ فنڪشن آهي.بجلي جي ناڪامي جي صورت ۾، خودڪار برڪ موٽر شافٽ کي مضبوطيء سان پڪڙيندو ته جيئن اهو گردش نه ڪري سگهي.ڪم ڪرڻ دوران، جڏهن ڊرل بٽ ڪم جي پيس کي نه ڇڪيندو، اهو تيزيء سان فيڊ ڪندو؛جڏهن ڊرل بٽ ورڪ پيس کي ڇڪي ٿو، اهو خودڪار طور تي ڪم ڪندڙ فيڊ ڏانهن سوئچ ڪندو.جڏهن ڊرل بٽ ورڪ پيس ۾ داخل ٿئي ٿو، اهو خودڪار طور تي تيز رفتار ريوائنڊ ڏانهن سوئچ ڪندو.جڏهن ڊرل بٽ جي پڇاڙيءَ واري ڪم واري حصي کي ڇڏي ۽ سيٽ پوزيشن تي پهچندي، اهو خودڪار گردش کي محسوس ڪرڻ لاءِ ايندڙ سوراخ واري پوزيشن ڏانهن ويندي.۽ اهو انڌا سوراخ ڊرلنگ، ملنگ، چيمفرنگ، چپ ٽوڙڻ، خودڪار چپ هٽائڻ، وغيره جي ڪم کي محسوس ڪري سگهي ٿو، جيڪو مزدور جي پيداوار کي بهتر بڻائي ٿو.


500mm اسٽروڪ مرڪب اسڪوائر ريم پاور هيڊ روايتي داخلن جي بدران لڪير گائيڊ استعمال ڪري ٿو رهنمائي جي درستگي کي بهتر بڻائڻ لاءِ جڏهن ته چورس رام جي سختي برقرار رکندي.
2.3. Workpiece هائيڊولڪ tightening فعل
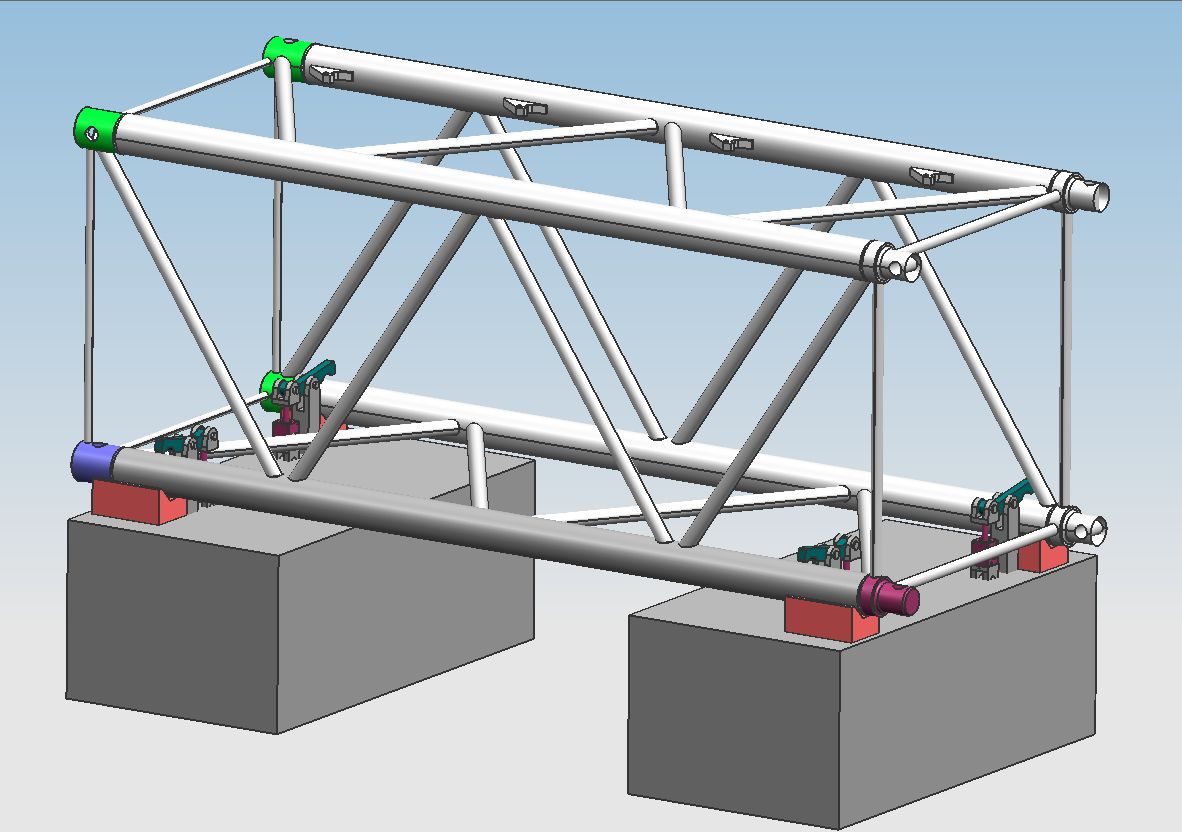
2.4چپ ڪڍڻ ۽ کولڻ
ڪم بينچ جي هيٺان ٻنهي پاسن تي سرپل ۽ فليٽ زنجير چپ ڪنويرز نصب ٿيل آهن، ۽ چپس خودڪار طريقي سان چپ ڪنويئر ڏانهن ختم ٿي سگهن ٿيون آخر ۾ سرپل ۽ زنجير پليٽ جي ٻن مرحلن ذريعي، تهذيب جي پيداوار کي محسوس ڪرڻ لاء.چپ کنويئر جي ٿڌي ٽانڪي ۾ هڪ کولنگ پمپ آهي، جيڪو اوزار جي خارجي کولنگ لاءِ استعمال ڪري سگهجي ٿو ته جيئن اوزار جي ڪارڪردگي ۽ سروس جي زندگي کي يقيني بڻائي سگهجي، ۽ کولنٽ کي ٻيهر استعمال ڪري سگهجي ٿو.
3. مڪمل ڊجيٽل عددي ڪنٽرول سسٽم:
3.1.چپ ٽوڙڻ واري فنڪشن سان، چپ ٽوڙڻ جو وقت ۽ چپ ٽوڙڻ واري چڪر کي انسان-مشين انٽرفيس تي مقرر ڪري سگهجي ٿو.
3.2.اوزار کڻڻ جي فنڪشن سان، اوزار کڻڻ جي فاصلي کي انسان-مشين انٽرفيس تي مقرر ڪري سگهجي ٿو.جڏهن پروسيسنگ هن فاصلي تي پهچندي، اوزار کي تيزيءَ سان کنيو ويندو، پوءِ چپس اڇلايا ويندا، ۽ پوءِ تيزيءَ سان ڊرلنگ جي مٿاڇري ڏانهن وڌندا ۽ خودڪار طريقي سان ڪم ۾ تبديل ٿي ويندا.
3.3.مرڪزي آپريشن ڪنٽرول باڪس ۽ هينڊ هيلڊ يونٽ عددي ڪنٽرول سسٽم کي اپنائڻ ۽ USB انٽرفيس ۽ LCD مائع ڪرسٽل ڊسپلي سان ليس آهن.پروگرامنگ، اسٽوريج، ڊسپلي ۽ ڪميونيڪيشن کي آسان ڪرڻ لاءِ، آپريشن انٽرفيس جا ڪم آهن جهڙوڪ انسان-مشين ڊائلاگ، غلطي جي تلافي، ۽ خودڪار الارم.
3.4.سامان کي پروسيسنگ کان اڳ سوراخ پوزيشن جو جائزو ۽ ٻيهر معائنو ڪرڻ جو ڪم آهي، ۽ آپريشن تمام آسان آهي.
4.خودڪار lubrication
مشين جو اوزار صحت واري لڪير گائيڊ ريل جوڙو، صحت واري بال اسڪرو جوڙو ۽ ٻيون اعلي صحت واري موشن جوڙو خودڪار لوبريڪيشن سسٽم سان ليس آهن.خودڪار لوبريڪٽنگ پمپ آئوٽ پريشر آئل ڪڍي ٿو، ۽ مقداري لوبريڪٽر آئل چيمبر تيل ۾ داخل ٿئي ٿو.تيل جي چيمبر کان پوء تيل سان ڀريو ويندو آهي، جڏهن سسٽم جو دٻاء 1.4-1.75Mpa تائين وڌي ٿو، سسٽم ۾ پريشر سوئچ بند ٿي ويندو آهي، پمپ بند ٿي ويندو آهي، ۽ ان لوڊ ڪرڻ وارو والو ساڳئي وقت ان لوڊ ٿي ويندو آهي.جڏهن روڊ ۾ تيل جو دٻاءُ 0.2Mpa کان هيٺ ٿي وڃي ٿو، مقداري لوبريڪٽر لوڻ واري پوائنٽ کي ڀرڻ شروع ڪري ٿو ۽ هڪ تيل ڀرڻ مڪمل ڪري ٿو.مقدار جي تيل جي انجيڪٽر جي صحيح تيل جي فراهمي ۽ سسٽم جي دٻاء کي ڳولڻ جي ڪري، تيل جي فراهمي قابل اعتماد آهي، انهي کي يقيني بڻائي ٿو ته هر ڪائنميٽڪ جوڙو جي مٿاڇري تي تيل فلم آهي، رگڻ ۽ لباس کي گهٽائڻ، ۽ نقصان کي روڪڻ. اندروني ڍانچي overheating سبب، مشين جي اوزار جي درستگي ۽ زندگي کي يقيني بڻائڻ لاء.سلائيڊنگ گائيڊ ريل جوڙو جي مقابلي ۾، هن مشين ٽول ۾ استعمال ٿيندڙ رولنگ لڪير گائيڊ ريل جوڙو فائدن جو هڪ سلسلو آهي:
① هاء موشن حساسيت، رولنگ گائيڊ ريل جو رگنگ ڪوئفينٽ ننڍڙو آهي، صرف 0.0025-0.01، ۽ ڊرائيونگ پاور تمام گهٽجي وئي آهي، جيڪا صرف عام مشين جي 1 جي برابر آهي./10.② متحرڪ ۽ جامد رگڙ جي وچ ۾ فرق تمام ننڍڙو آهي، ۽ فالو اپ ڪارڪردگي شاندار آهي، اهو آهي، ڊرائيونگ سگنل ۽ مشيني عمل جي وچ ۾ وقت جو وقفو انتهائي مختصر آهي، جيڪو جواب جي رفتار ۽ حساسيت کي بهتر ڪرڻ لاء سازگار آهي. عددي ڪنٽرول سسٽم.
③ اهو تيز رفتار واري لڪير واري حرڪت لاءِ موزون آهي، ۽ ان جي فوري رفتار سلائيڊنگ گائيڊ ريل جي ڀيٽ ۾ 10 ڀيرا وڌيڪ آهي.④ اهو gapless تحريڪ جو احساس ۽ مشيني نظام جي تحريڪ rigidity بهتر ڪري سگهو ٿا.⑤ پيشه ورانه ٺاهيندڙن پاران تيار ڪيل، اهو اعلي سڌائي، سٺي استحڪام ۽ آسان سار سنڀال آهي.
5.محور ليزر جي چڪاس:
بوسمن جي هر مشين کي برطانيه ۾ RENISHAW ڪمپني جي ليزر انٽرفيروميٽر ذريعي ترتيب ڏني وئي آهي ته جيئن پچ جي غلطي، پٺڀرائي، پوزيشن جي درستگي، ٻيهر پوزيشن جي درستگي، وغيره کي درست طور تي معائنو ڪرڻ ۽ معاوضو ڏيڻ لاء، متحرڪ، جامد استحڪام ۽ پروسيسنگ جي درستگي کي يقيني بڻائڻ لاء. مشينبالبار جو معائنو هر مشين برٽش RENISHAW ڪمپني مان هڪ بالبار استعمال ڪري ٿي صحيح دائري جي درستگي ۽ مشين جي جاميٽري جي درستگي کي ترتيب ڏيڻ لاءِ، ۽ هڪ ئي وقت سرڪلر ڪٽڻ جا تجربا ڪري ٿي ته جيئن مشين جي 3D مشين جي درستگي ۽ سرڪيولر درستگي کي يقيني بڻائي سگهجي.


6مشين ٽول ماحول:
6.1.سامان استعمال ماحول جي گهرج
محيطي جي درجه حرارت جي مسلسل سطح کي برقرار رکڻ صحت واري مشين لاء هڪ لازمي عنصر آهي.
(1) استعمال لائق ماحولي گرمي پد جي گهرج -10 ℃ ~ 35 ℃ آهي، جڏهن محيط جو گرمي پد 20 ℃ آهي، نمي 40 ~ 75٪ هجڻ گهرجي.
(2) مخصوص رينج اندر مشين ٽول جي جامد درستگي کي برقرار رکڻ لاء، وڌ کان وڌ ماحول جي گرمي پد جي ضرورت آهي 15 ° C کان 25 ° C، ۽ درجه حرارت جي فرق
±2°C/24h کان وڌيڪ نه هجڻ گهرجي.
6.1.2.پاور سپلائي وولٹیج: 3 مرحلن، 380V، ±10٪ وولٹیج جي وهڪري جي حد اندر، بجلي جي فراهمي جي تعدد: 50HZ.
6.1.3.جيڪڏهن استعمال جي علائقي ۾ وولٹیج غير مستحڪم آهي، مشين ٽول کي هڪ مستحڪم پاور سپلائي سان ليس ڪيو وڃي ته جيئن مشين جي اوزار جي عام آپريشن کي يقيني بڻائي سگهجي.
6.1.4.مشين ٽول کي قابل اعتماد گرائونڊ هجڻ گهرجي: گرائونڊنگ تار هڪ ٽامي جي تار آهي، تار جو قطر 10mm² کان گهٽ نه هجڻ گهرجي، ۽ گرائونڊنگ مزاحمت 4 Ω کان گهٽ هجڻ گهرجي.
6.1.5.سامان جي عام ڪم ڪندڙ ڪارڪردگي کي يقيني بڻائڻ لاء، جيڪڏهن هوائي ذريعن جي ڪمپريشن ايئر ايئر ذريعن جي گهرجن کي پورا نه ڪري سگهي، ان کي مشين جي اوزار تي نصب ڪيو وڃي.
هوا کان اڳ ايئر ماخذ صاف ڪرڻ واري ڊوائيس جو هڪ سيٽ شامل ڪريو (dehumidification، degreasing، فلٽرنگ).
6.1.6.سامان کي سڌو سج جي روشني، وائبريشن ۽ گرمي جي ذريعن، تيز فريڪئنسي جنريٽر، اليڪٽرڪ ويلڊنگ مشينن وغيره کان پري رکو ته جيئن مشين ٽول جي پيداوار ۾ ناڪامي يا مشين ٽول جي درستگي جي نقصان کان بچي سگهجي.
7.ٽيtechnical parameters:
| ماڊل | 6025-6Z | |
| پروسيسنگ workpiece سائيز | ڊگھائي × ويڪر × اوچائي (ايم ايم) | 6000×2300×2300 |
| Gantry وڌ ۾ وڌ کاڌو | ويڪر (mm) | 6800 |
| ڪم ڪندڙ ڊيسڪ سائيز | ڊگھائي X ويڪر (ايم ايم) | 3000*1000 = 4 |
| ڪالمن جو سفر | ڪالم اڳتي ۽ پوئتي ھلڻ (mm) | 7000 |
| ڊبل رام مٿي ۽ هيٺ مٿي | رام جو مٿي ۽ هيٺان اسٽروڪ (ايم ايم) | 2500 |
| اسپنڊل سينٽر کان ٽيبل جهاز جي مفاصلي تي | 0-2500mm | |
|
افقي رام قسم جي سوراخ ڪرڻ واري سر پاور سر هڪ ٻه
| مقدار (2) | 2 |
| اسپنڊل ٽيپر | بي ٽي 50 | |
| سوراخ ڪرڻ جو قطر (ايم ايم) | Φ2-Φ60 | |
| ٽيپنگ قطر (ايم ايم) | M3-M30 | |
| اسپنڊل جي رفتار (r/min) | 30 ~ 5000 | |
| سرو اسپنڊل موٽر پاور (kw) | 37*2 | |
| کاٻي ۽ ساڄي سفر جو فاصلو ٻن اسپنڊل سرن جي وچ ۾ | 5800-6800mm | |
| رام جي کاٻي ۽ ساڄي اسٽروڪ (ايم ايم) | 500 | |
| ٻه طرفي پوزيشن جي درستگي | 300mm * 300mm | ±0.025 |
| ٻه طرفي ورجائي پوزيشن جي درستگي | 300mm * 300mm | ±0.02 |
| مشيني اوزار جي ماپ | ڊگھائي × ويڪر × اوچائي (ايم ايم) | ڊرائنگ جي مطابق (جيڪڏهن ڊزائن جي عمل ۾ تبديليون آهن، اسان توهان کي مطلع ڪنداسين) |
| مجموعي وزن (ٽي) | 72 تي | |