BOSM - افقي ڪائونٽر ڊرلنگ ۽ بورنگ مشين
1. سامان جو استعمال:
BOSM افقي ڪائونٽر ڊرلنگ ۽ بورنگ مشين هڪ خاص مشين آهي توهان جي ڪمپني لاءِ ٽاور ڪرين ڪيپس کي پروسيس ڪرڻ لاءِ.مشين 2 سيٽن سان ليس آهي افقي ڊرلنگ ۽ بورنگ پاور هيڊز، جيڪي ڊرلنگ، ملنگ ۽ ڪم پيسز جي بورنگ کي موثر اسٽروڪ رينج ۾ محسوس ڪري سگھن ٿيون.ڪٽڻ ۽ ٻين پروسيسنگ، سامان جي پوزيشن جي رفتار تيز آهي، پروسيسنگ جي درستگي اعلي آهي، ۽ پروسيسنگ ڪارڪردگي اعلي آهي.
2. سامان جي جوڙجڪ خاصيتون:
2. 1. جي مکيه اجزاءمشين
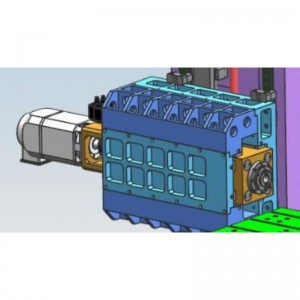
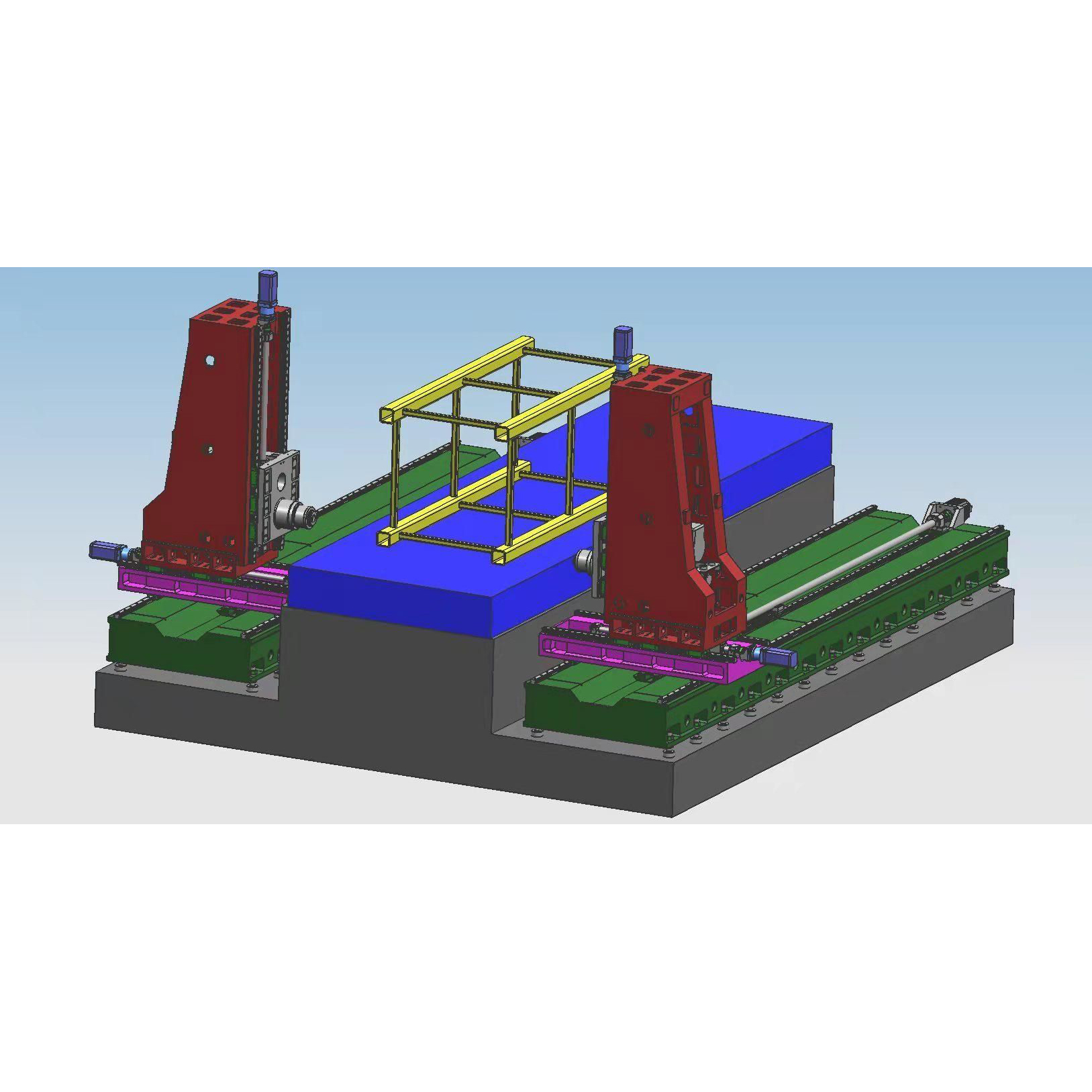
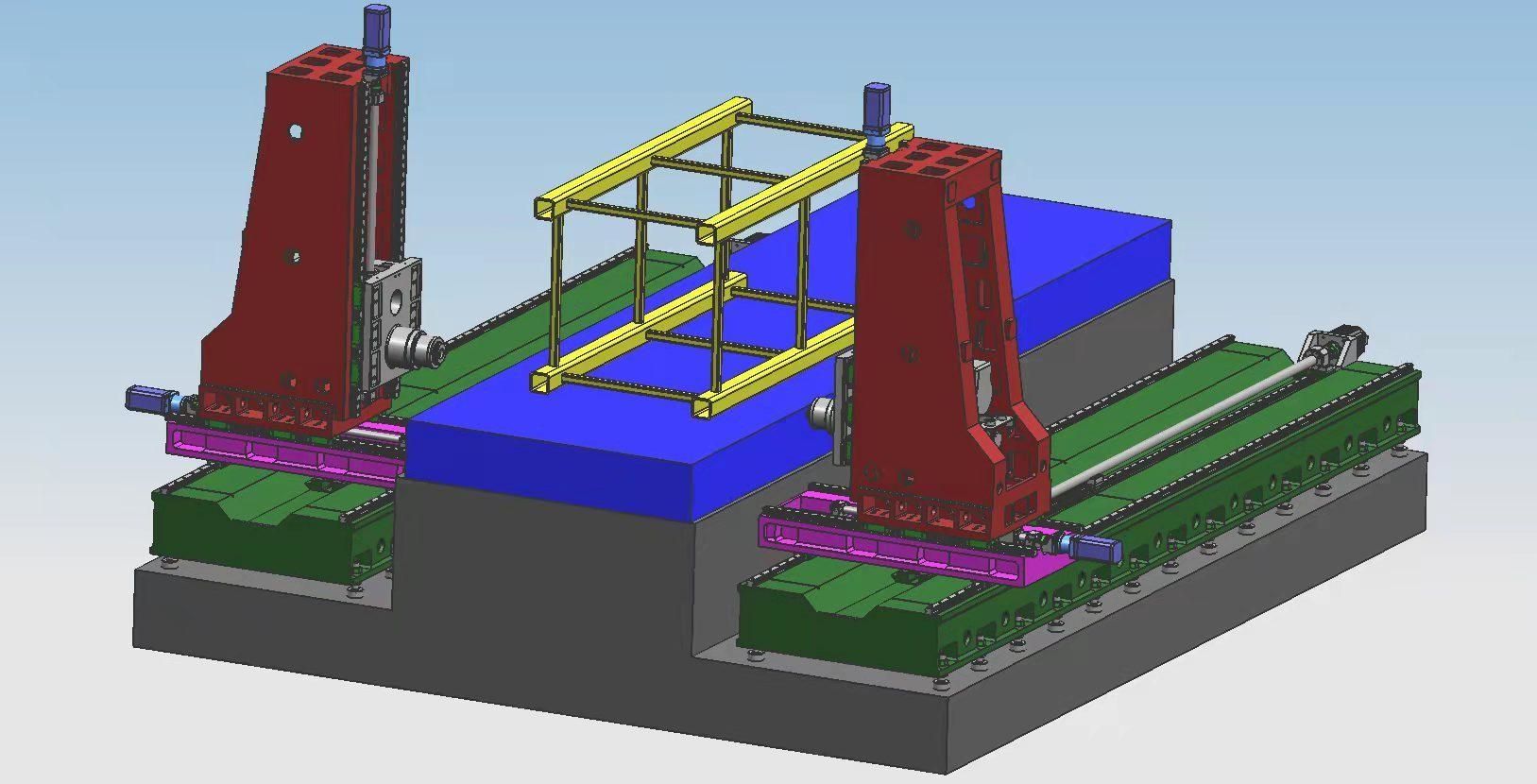
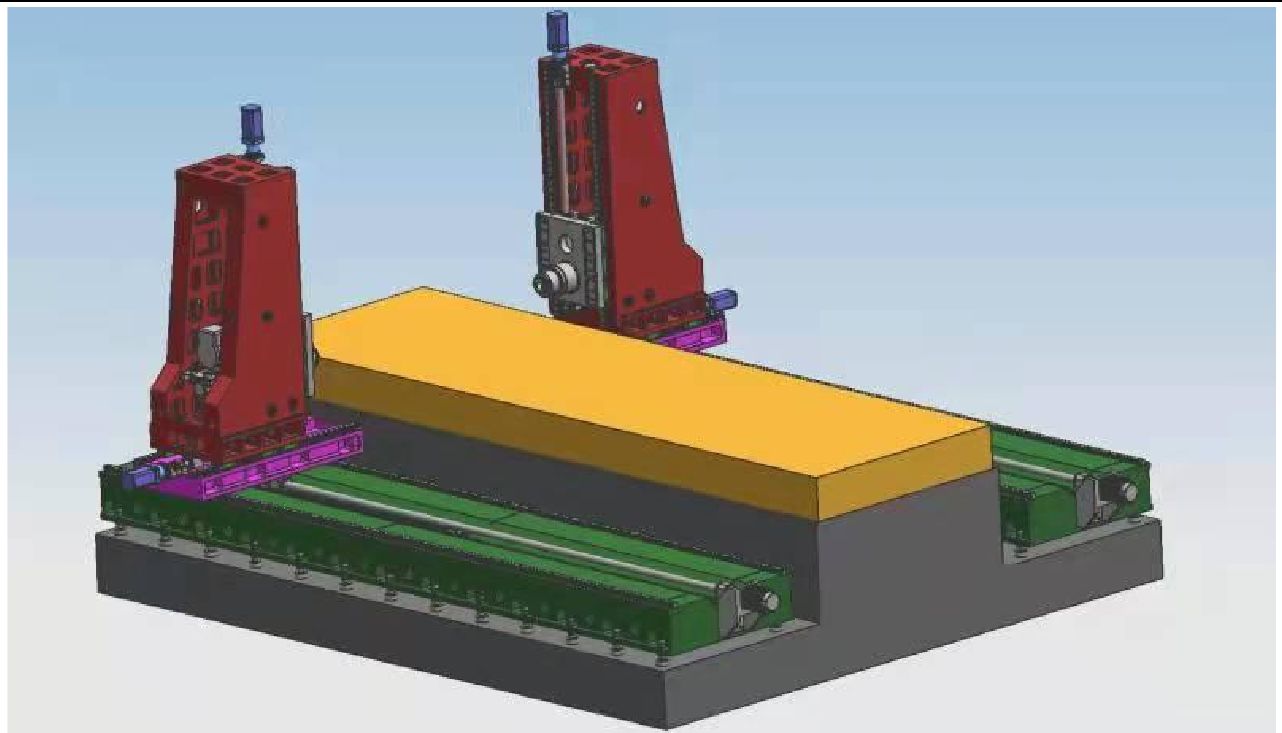
مشين جا مکيه حصا: بيڊ، ڪم جي ٽيبل، کاٻي ۽ ساڄي ڪالم، سيڊل، ريم، وغيره.، وڏا حصا رال سان ٺهيل ٺهيل آهن، اعلي معيار جي گرين آئرن 250 ڪاسٽنگ، گرم واريء جي کڏ ۾ annealed → vibration aging → گرم فرنس اينيلنگ → وائبريشن ايجنگ → روف مشيننگ → وائبريشن ايجنگ → فرنس اينيلنگ → وائبريشن ايجنگ → مڪمل طور تي حصن جي منفي دٻاءُ کي ختم ڪرڻ ۽ حصن جي ڪارڪردگي کي مستحڪم رکڻ لاءِ ختم ڪرڻ.سامان جي ڪم بينچ مقرر ڪئي وئي آهي، ۽ ٻنهي پاسن تي پاور سر بنيادي جي اڳيان ۽ پوئين طرفن ۾ منتقل ٿي سگهن ٿا؛مشين جا ڪم آهن جهڙوڪ ڊرلنگ، بورنگ، ڪائونٽر سڪنگ، ٽيپنگ وغيره. ٽول جي کولنگ جو طريقو اندروني کولنگ ۽ خارجي کولنگ آهي.مشين تي مشتمل آهي 5 فيڊ محور، 2 ڪٽڻ واري پاور هيڊ، جيڪي هڪ ئي وقت ۾ 5 محور سان هم وقت سازي ڪري سگھجن ٿيون، يا اڪيلو ڪم ڪندڙ ٿي سگهن ٿيون.مشين جي محوري هدايت ۽ پاور سر هيٺ ڏنل شڪل ۾ ڏيکاريل آهن.
2. 2 محوري ٽرانسميشن فيڊ حصو جي بنيادي جوڙجڪ
2.2.1 X محور: پاور هيڊ بيس جي گائيڊ ريل سان گڏ پوئتي موٽائي ٿو.
X1-axis ڊرائيو: AC سروو موٽر پلس هاء-پريجنشن پلانٽ ريڊيسر استعمال ڪيو ويندو آهي پاور هيڊ کي هلائڻ لاءِ بال اسڪرو ڊرائيو ذريعي X-axis جي لڪير واري حرڪت کي محسوس ڪرڻ لاءِ.
X2-axis ٽرانسميشن: AC سروو موٽر پلس اعلي-صحت واري سيارو گھٽائڻ وارو استعمال ڪيو ويندو آهي پاور هيڊ کي هلائڻ لاءِ بال اسڪرو ٽرانسميشن ذريعي X-axis لڪير واري حرڪت کي محسوس ڪرڻ لاءِ.
ھدايت واري ريل جو فارم: ٻه اعلي طاقت واري سڌائي واري لڪير واري گائيڊ ريل ويڙھيل بنياد تي ٽائل ٿيل آھن.
2.2 Y1 محور: پاور هيڊ ڪالمن تي مٿي ۽ هيٺان موٽائي ٿو.
Y1-axis ڊرائيو: Y1-axis جي لڪير واري حرڪت کي محسوس ڪرڻ لاءِ بال اسڪرو ذريعي ڊرائيو ڪرڻ لاءِ AC سروو موٽر کي اپنائڻ.ھدايت ريل فارم: 4 ٽڪر 45 قسم لڪير گائيڊ ريل جا.
2.2.3 Y2 محور: پاور هيڊ ڪالمن تي مٿي ۽ هيٺان موٽائي ٿو.
Y2-axis ٽرانسميشن: AC سروو موٽر بال اسڪرو ذريعي هلائڻ لاءِ استعمال ڪيو ويندو آهي Y1-محور جي لڪير واري حرڪت کي محسوس ڪرڻ لاءِ.
ھدايت ريل فارم: 4 ٽڪر 45 قسم لڪير گائيڊ ريل جا.
2.2.4 Z1 محور: پاور هيڊ سيڊل تي اڳتي ۽ پوئتي موٽائي ٿو.
Z1-axis ٽرانسميشن: AC سروو موٽر ۽ اعلي-صحت واري سيارو گھٽائڻ وارو استعمال ڪيو ويندو آهي حرڪت کي هلائڻ لاءِ بال اسڪرو ذريعي Z1-محور جي لڪير واري حرڪت کي محسوس ڪرڻ لاءِ.
2.2.5 Z2 محور: پاور هيڊ سيڊل تي اڳتي ۽ پوئتي موٽائي ٿو.
Z2-axis ٽرانسميشن: AC سروو موٽر ۽ اعلي-صحت واري سيارو گھٽائڻ وارو استعمال ڪيو ويندو آھي حرڪت کي هلائڻ لاءِ بال اسڪرو ذريعي Z2-axis لڪير واري حرڪت کي محسوس ڪرڻ لاءِ.
2.3. چپ ڪڍڻ ۽ کولڻ
ڪم بينچ جي هيٺان ٻنهي پاسن تي فليٽ چين چپ ڪنويرز نصب ٿيل آهن، ۽ لوهه جي چپس کي ختم ڪري سگهجي ٿو چپ ڪنويئر ۾ آخر ۾ تهذيب جي پيداوار کي محسوس ڪرڻ لاء.چپ کنويئر جي کولنگ ٽينڪ ۾ هڪ کولنگ پمپ آهي، جيڪو اوزار جي اندروني کولنگ + خارجي کولنگ لاءِ استعمال ڪري سگهجي ٿو ته جيئن اوزار جي ڪارڪردگي ۽ سروس جي زندگي کي يقيني بڻائي سگهجي، ۽ کولنٽ کي ٻيهر استعمال ڪري سگهجي ٿو.
3.مڪمل ڊجيٽل عددي ڪنٽرول سسٽم:
3.1.چپ ٽوڙڻ واري فنڪشن سان، چپ ٽوڙڻ جو وقت ۽ چپ ٽوڙڻ واري چڪر کي انسان-مشين انٽرفيس تي مقرر ڪري سگهجي ٿو.
3.2.اوزار کڻڻ جي فنڪشن سان، اوزار کڻڻ جي فاصلي کي انسان-مشين انٽرفيس تي مقرر ڪري سگهجي ٿو.جڏهن فاصلو پهچي ويندو، اوزار کي تيزيء سان ڪڍيو ويندو، ۽ پوء چپس اڇلائي ويندا، ۽ پوء تيزيء سان اڳتي وڌڻ واري مٿاڇري ڏانهن ۽ خودڪار طريقي سان ڪم ۾ تبديل ٿي ويندي.
3.2.مرڪزي آپريشن ڪنٽرول باڪس ۽ هينڊ هيلڊ يونٽ عددي ڪنٽرول سسٽم کي اپنائڻ ۽ USB انٽرفيس ۽ LCD مائع ڪرسٽل ڊسپلي سان ليس آهن.پروگرامنگ، اسٽوريج، ڊسپلي ۽ ڪميونيڪيشن کي آسان ڪرڻ لاءِ، آپريشن انٽرفيس جا ڪم آهن جهڙوڪ انسان-مشين ڊائلاگ، غلطي جي تلافي، ۽ خودڪار الارم.
3.2.. سامان کي پروسيسنگ کان اڳ سوراخ جي پوزيشن جو جائزو ۽ ٻيهر معائنو ڪرڻ جو ڪم آهي، ۽ آپريشن تمام آسان آهي.
4.خودڪار lubrication
مشين جي صحت واري لڪير گائيڊ ريل جوڙو، صحت واري بال اسڪرو جوڙو ۽ ٻيا اعلي صحت واري موشن جوڙو خودڪار لوبريڪيشن سسٽم سان ليس هوندا آهن.خودڪار لوبريڪٽنگ پمپ آئوٽ پريشر آئل ڪڍي ٿو، ۽ مقداري لوبريڪٽر آئل چيمبر تيل ۾ داخل ٿئي ٿو.جڏهن آئل چيمبر تيل سان ڀريو ويندو آهي ۽ سسٽم جو دٻاءُ 1.4 ~ 1.75Mpa تائين وڌي ويندو آهي، سسٽم ۾ پريشر سوئچ بند ٿي ويندو آهي، پمپ بند ٿي ويندو آهي، ۽ ان لوڊ ڪرڻ وارو والو ساڳئي وقت ان لوڊ ڪيو ويندو آهي.جڏهن روڊ ۾ تيل جو دٻاءُ 0.2Mpa کان هيٺ ٿي وڃي ٿو، مقداري لوبريڪٽر لوڻ واري پوائنٽ کي ڀرڻ شروع ڪري ٿو ۽ هڪ تيل ڀرڻ مڪمل ڪري ٿو.مقداري آئلر طرفان فراهم ڪيل تيل جي صحيح مقدار ۽ سسٽم جي دٻاءُ کي معلوم ڪرڻ جي صلاحيت جي ڪري، تيل جي فراهمي قابل اعتماد آهي ۽ يقيني بڻائي ٿي ته هر ڪائنيميٽڪ جوئر جي مٿاڇري تي هڪ آئل فلم آهي، جيڪا رگڙ گهٽائي ٿي ۽ پائڻ ۽ نقصان کي روڪي ٿي. اندروني ڍانچي ڏانهن، جيڪو وڌيڪ گرميء جي ڪري ٿي.، مشين جي درستگي ۽ زندگي کي يقيني بڻائڻ لاءِ.
5. مشينماحول استعمال ڪريو:
بجلي جي فراهمي: ٽي مرحلو AC380V±10%، 50Hz±1 ماحوليات جو درجو: -10°~ 45°
6.قبوليت جا معيار:
JB/T10051-1999 "هائيڊولڪ سسٽم لاءِ عام ٽيڪنيڪل وضاحتون ميٽيل ڪٽڻ واري مشين"
7.ٽيڪنيڪل پيراگراف:
| ماڊل | 2050-5Z | |
| وڌ ۾ وڌ پروسيسنگ workpiece سائيز | ڊگھائي × ويڪر × اوچائي (mm) | 5000×2000×1500 |
| ڪم ڪندڙ ڊيسڪ سائيز | ڊگھائي X ويڪر (ايم ايم) | 5000*2000 |
| پاور سر بنيادي هدايت سفر | اڳتي ۽ پوئتي ھلايو (mm) | 5000 |
| پاور سر مٿي ۽ هيٺ | رام جو مٿي ۽ هيٺان اسٽروڪ (ايم ايم) | 1500 |
|
افقي رام قسم ڊرلنگ پاور هيڊ پاور هيڊ 1 2 | مقدار (2 پي سيز) | 2 |
| اسپنڊل ٽيپر | بي ٽي 50 | |
| سوراخ ڪرڻ جو قطر (ايم ايم) | Φ2-Φ60 | |
| ٽيپنگ قطر (ايم ايم) | M3-M30 | |
| اسپنڊل جي رفتار (r/min) | 30 ~ 3000 | |
| سرو اسپنڊل موٽر پاور (kw) | 22*2 | |
| کاٻي ۽ ساڄي سفر (ايم ايم) | 600 | |
| ٻه طرفي پوزيشن جي درستگي | 300mm * 300mm | ±0.025 |
| ٻه طرفي ورجائي پوزيشن جي درستگي | 300mm * 300mm | ±0.02 |